Cleaning and Cooler System for Photovoltaic
Tujuan dari rancangan yang dilakukan ialah sebagai berikut:
1. Merancang sistem monitoring panel surya berbasis mikrokontroler yang mampu membaca data dari sensor debu, suhu, kelembaban, arus, dan intensitas cahaya secara real-time.
2. Mengembangkan sistem pembersihan otomatis yang aktif ketika deteksi debu melebihi ambang batas tertentu menggunakan pompa air dan motor DC.
3. Mengimplementasikan sistem pendinginan aktif berbasis suhu, yang akan menyemprotkan air secara otomatis jika suhu panel melebihi 50°C.
4. Menerapkan komunikasi antar dua mikrokontroler Raspberry Pi Pico untuk membagi fungsi kontrol dan pemantauan, sehingga sistem lebih modular dan mudah dikembangkan.
5. Mengoptimalkan efisiensi kerja panel surya melalui pendekatan monitoring dan pemeliharaan otomatis berbasis Internet of Things (IoT).
- raspberry pi pico


- DHT22 Sensor
- ACS712 Sensor

Sensor ACS712 adalah sensor arus berbasis efek Hall yang dapat digunakan untuk mengukur aruslistrik AC maupun DC secara akurat. Sensor ini bekerja dengan membaca medan magnet yang dihasilkan oleh aliran arus listrik dan mengubahnya menjadi sinyal tegangan analog. Sensor ini sering digunakan dalam proyek monitoring arus beban motor, sistem tenaga, serta aplikasi proteksi sirkuit.
- LDR Sensor
Light Dependent Resistor (LDR) adalah jenis Resistor yang nilai hambatan atau nilai resistansinya tergantung pada intensitas cahaya yang diterimanya. Nilai Hambatan LDR akan menurun pada saat cahaya terang dan nilai Hambatannya akan menjadi tinggi jika dalam kondisi gelap. Fungsi LDR (Light Dependent Resistor) adalah untuk menghantarkan arus listrik jika menerima sejumlah intensitas cahaya (Kondisi Terang) dan menghambat arus listrik dalam kondisi gelap.
Naik turunnya nilai Hambatan akan sebanding dengan jumlah cahaya yang diterimanya. Pada umumnya, Nilai Hambatan LDR akan mencapai 200 Kilo Ohm (kΩ) pada kondisi gelap dan menurun menjadi 500 Ohm (Ω) pada Kondisi Cahaya Terang.
LDR (Light Dependent Resistor) yang merupakan Komponen Elektronika peka cahaya ini sering digunakan atau diaplikasikan dalam Rangkaian Elektronika sebagai sensor pada Lampu Penerang Jalan, Lampu Kamar Tidur, Rangkaian Anti Maling, Shutter Kamera, Alarm dan lain sebagainya.
- Dust Sensor
Sensor GP2Y1014AU0F adalah sensor optik yang dirancang untuk mendeteksi partikel debu dan asap di udara. Sensor ini menggunakan sinar infra merah dan fotodetektor untuk mengukur jumlah partikel yang tersebar di udara, sehingga sering digunakan dalam alat pemantauan kualitas udara, sistem HVAC, dan aplikasi IoT berbasis lingkungan.


- pompa air 5 v

- selang air

Selang air pada pompa air berfungsi sebagai saluran untuk mengalirkan air dari sumber air ke tempat yang dituju, seperti keran, instalasi irigasi, atau bak penampungan. Selang juga berperan penting dalam menjaga aliran air yang lancar dan konsisten, serta melindungi pompa dari tekanan air yang berlebihan atau gesekan dengan benda keras.
- breadboard

- baterai

2. Seng (Zn) sebagai katode (kutub negatif baterai)
3. Amonium dioksida (NH4CI) sebagai larutan elektrolit (penghantar)
- jumper

merupakan kabel elektrik yang mempunyai pin konektor di setiap ujungnya dan memungkinkan untuk menghubungkan dua komponen yang melibatkan Arduino tanpa memerlukan solder. Intinya, kegunaan kabel jumper ini digunakan sebagai konduktor listrik untuk menyambungkan rangkaian listrik.
Kabel jumper biasanya digunakan pada breadboard atau alat prototyping lainnya supaya lebih mudah untuk mengutak-atik rangkaian. Konektor yang terdapat pada ujung kabel terdiri dari konektor jantan (male connector) dan konektor betina (female connector). Konektor female berfungsi untuk menusuk dan konektor male berfungsi untuk ditusuk.
- LCD 16x2 I2C

1. Mikrokontroler
Mikrokontroler merupakan suatu Integrated Circuit (IC) yang berisi Central Processing Unit (CPU), Read Only Memory (ROM), Random Access Memory (RAM), dan Input/Output. Mikrokontroler melakukan proses berfikir berdasarkan program yang telah diinput.
Raspberry Pi Pico adalah mikrokontroler yang dikembangkan oleh Raspberry Pi Foundation dan dirilis pada tahun 2021. Pico menggunakan chip RP2040, yaitu mikrokontroler 32-bit berbasis ARM Cortex-M0+ dual-core dengan kecepatan clock hingga 133 MHz. Chip ini dirancang untuk efisiensi tinggi dan fleksibilitas penggunaan pada berbagai aplikasi tertanam.

Gambar 1. Konfigurasi Pin Raspberry Pi Pico
Gambar di atas dijelaskan sebagai berikut :
a) Jumlah dan Jenis Pin
Raspberry Pi Pico memiliki 40 pin fisik, dengan 26 pin GPIO multifungsi, serta sisanya dialokasikan untuk power, ground, dan fungsi khusus.
b) Fungsi Utama Pin GPIO
Setiap pin GPIO dapat dikonfigurasi untuk berbagai fungsi, antara lain:
a) Digital Input/Output (I/O)
b) Analog Input (ADC) pada GPIO26, GPIO27, dan GPIO28
c) PWM (Pulse Width Modulation)
d) Komunikasi Serial: UART (Universal Asynchronous Receiver Transmitter), I2C (Inter-Integrated Circuit), SPI (Serial Peripheral Interface).
c) Konfigurasi Pin-Komunikasi Berdasarkan Gambar
UART
1. UART0: TX: GPIO0, RX: GPIO1
2. UART1: TX: GPIO8, GPIO4, RX: GPIO9, GPIO5
UART ini digunakan untuk komunikasi serial antar-Pico atau ke modul lain.
I2C
1. I2C0:
• SDA: GPIO0, GPIO4
• SCL: GPIO1, GPIO5
2. I2C1:
• SDA: GPIO2, GPIO6, GPIO14, GPIO18, GPIO26
• SCL: GPIO3, GPIO7, GPIO15, GPIO19, GPIO27
I2C cocok untuk komunikasi sensor-sensor seperti DHT22 atau modul OLED.
SPI
1. SPI0:
• TX: GPIO3, GPIO7
• RX: GPIO0, GPIO4
• SCK: GPIO2, GPIO6
• CSn: GPIO1, GPIO5
2. SPI1:
• TX: GPIO11
• RX: GPIO12
• SCK: GPIO10
• CSn: GPIO9
SPI umumnya digunakan untuk komunikasi cepat dengan modul seperti SD Card.
ADC (Analog to Digital Converter)
• ADC0: GPIO26
• ADC1: GPIO27
• ADC2: GPIO28
Pin ini sangat penting untuk membaca sinyal analog seperti dari sensor debu (dengan tegangan analog) atau sensor arus ACS712.
4. Power dan Ground
• VBUS (Pin 40): Tegangan input dari USB (sekitar 5V)
• 3V3 (OUT): Output tegangan 3.3V, digunakan untuk memberi daya ke sensor eksternal
• VSYS: Tegangan sistem (biasanya 5V dari USB atau sumber lainnya)
SPESIFIKASI
Raspberry
Microcontroller
Pi Pico RP2040
Operating Voltage
3.3V
InputVoltage (recommended)
5V
Input Voltage (limit)
1.8-5.5V
Digital I/O Pins
26 (semua bisa digunakan sebagai digital i/o)
PWM Digital I/O Pins
16 channels (8 independent PWM slices)
Analog Input Pins
3 (ADC 12-bit)
DC Current per I/O Pin
Max 15 mA
DC Current for 3.3V Pin
max 300 mA total (dari regulator onboard)
Flash Memory
2 MB (QSPI Flash)
SRAM
264 KB (on-chip)
Clock Speed
133 MHz (default, up to 133 MHz)
LED_BUILTIN
GPIO 25
Length
51 mm
Width
21 mm
Weight
±3 gram
Table 1. Spesifikasi Rasberry Pi Pico
Raspberry Pi Pico dapat diaktifkan melalui koneksi micro USB atau melalui catu daya eksternal melalui pin VSYS. Daya eksternal (non-USB) dapat berasal dari adaptor AC-ke-DC atau dari baterai. Daya tersebut dapat disambungkan ke pin VSYS dan GND pada header pin Pico. Kisaran tegangan input yang disarankan untuk Pico adalah 1.8V hingga 5.5V, namun sumber tegangan umum yang digunakan adalah 5V dari USB. Memberikan tegangan lebih dari batas ini dapat merusak regulator internal atau komponen lainnya.
Jenis Jenis Pin daya adalah sebagai berikut:
1. VSYS. Tegangan masukan utama ke board Raspberry Pi Pico, dapat berasal dari USB atau sumber eksternal (seperti baterai atau adaptor DC).
2. VBUS. Pin ini menyediakan tegangan 5V langsung dari koneksi USB saat board terhubung ke komputer atau adaptor USB.
3. 3V3 (OUT). Pasokan daya 3.3V yang dihasilkan oleh regulator internal dan digunakan untuk mikrokontroler serta perangkat eksternal. Total arus maksimal sekitar 300 mA.
4. GND. Pin ground (tanah) yang digunakan sebagai referensi tegangan.
Input dan Output Raspberry Pi Pico memiliki 26 pin GPIO (General Purpose Input Output) multifungsi yang dapat dikonfigurasi sebagai input atau output menggunakan fungsi-fungsi dari pustaka seperti MicroPython atau C SDK. Pin-pin ini beroperasi dengan tegangan logika 3.3V. Setiap pin dapat memberikan atau menerima arus maksimal sekitar 15 mA, dan total arus output dari semua pin tidak boleh melebihi batas regulator internal.
Beberapa pin juga memiliki fungsi khusus:
1. UART (Serial): Terdapat dua UART (default di GPIO0 dan GPIO1) yang dapat digunakan untuk komunikasi serial TTL. UART dapat digunakan untuk komunikasi dengan sensor, komputer, atau modul komunikasi seperti Bluetooth.
2. Interrupt Eksternal: Hampir semua GPIO mendukung interrupt yang dapat dikonfigurasi untuk memicu berdasarkan perubahan logika tinggi atau rendah, mirip dengan fungsi attachInterrupt() pada Arduino.
3. PWM: Raspberry Pi Pico memiliki 16 channel PWM, dengan 8 PWM slice yang dapat dipetakan ke berbagai GPIO. Fungsi ini mendukung output PWM untuk kontrol kecepatan motor, kecerahan LED, dsb.
4. SPI: Pico memiliki dua antarmuka SPI yang dapat dikonfigurasi melalui berbagai kombinasi GPIO. SPI digunakan untuk komunikasi dengan perangkat seperti sensor, layar, dan memori eksternal.
5. I2C: Terdapat dua antarmuka I2C, yang bisa digunakan pada hampir semua GPIO (karena fungsi pin fleksibel). I2C sangat berguna untuk menghubungkan berbagai sensor dan modul dengan alamat yang unik.
6. LED: GPIO 25. Raspberry Pi Pico memiliki satu LED bawaan yang terhubung ke GPIO 25. LED akan menyala jika pin ini diberi nilai logika HIGH dan mati jika diberi logika LOW.
Raspberry Pi Pico memiliki 3 pin input analog: ADC0 (GPIO26), ADC1 (GPIO27), dan ADC2 (GPIO28). Ketiganya terhubung ke ADC 12-bit, yang memberikan resolusi hingga 4096 nilai berbeda. Selain itu, terdapat pin ADC4 internal yang digunakan untuk pembacaan suhu internal chip.
2. PWM
PWM merupakan sebuah mekanisma untuk membangkitkan sinyal keluaran yang periodenya berulang antara high dan low, dimana kita dapat mengontrol durasi sinyal sesuai dengan yang kita inginkan. Duty cycle merupakan presentase periode sinyal high dan low. Presentase duty cycle bebanding lurus dengan tegangan rata- rata yang dihasilkan.
2.1 Prinsip dasar PWM
Modulasi lebar pulsa (PWM) dicapai dengan bantuan gelombang kotak yang mana duty cycle gelombang dapat diubah ubah untuk mendapatkan keluaran bervariasi yang merupakan nilai rata- rata dari gelombang tersebut.

Gambar 2. Bentuk Gelombang Kotak
PWM bekerja sebagai switching power suplai untuk mengontrol on dan off. Tegangan dc dikonversi menjadi sinyal kotak bolak balik, saat on mendekati tegangan puncak dan saat off mrnjadi nol (0) volt. Jika frekuensi switching cukup tinggi maka teemperatur air yang dikendalikan akan semakin sesuai dengan yang diharapkan. Dengan mengatur duty cycle dari sinyal (modulasi lebar pulsa dari sinyal disebabkan oleh PWM). Terlihat pada gambar di bawah sinyal ref adalah sinyal tegangan dc yang dikonversi oleh sinyal gergaji dan menghasilkan sinyal kotak

Gambar 3. Sinyal Referensi
Informasi analog dapat dikirimkan dengan menggunakan pulsa tegangan atau pulsa arus. Dengan modulasi pulsa, pembawa informasi terdiri dari pulsa persegi yang berulang. Salah satu teknik modulasi yang sering digunakan adalah teknik modulasi durasi atur lebar dari waktu tunda positif ataupun waktu tunda negatif pulsa persegi tersebut. Untuk membangkitkan sinyal PWM adalah dengan menggunakan fungsi timer/counter yang dibandingkan nilainya dengan sebuah register tertentu.
3. ADC
Sistem mikrokontroler hanya dapat mengolah data dalam bentuk bine. Oleh sebab itu setiap data analog yang akan diproses oleh mikrokontroler harus diubah kedalam bentuk kode biner dimana Pengubahan data analog kedalam bentuk biner ditangani oleh piranti ADC. Tegangan masukan ADC didapatkan dari tranducer. Tranducer adalah pengubah besaran kontinu, dalam hal ini adalah tegangan DC 12 Volt. Tegangan listrik yang dihasilkan oleh tranducer yang berubah secara kontinu pada suatu kisaran tertentu disebut tegangan analog, dan tegangan analog ini diubah oleh ADC menjadi bentuk digital yang sebanding dengan tegangan analognya.
Ada 4 karakteristik yang perlu diperhatikan dalam pemilihan komponen ADC, antara lain :
1) Resolusi
Merupakan spesifikasi terpenting untuk ADC, yaitu jumlah langkah dari sinyal skala penuh yang dapat dibagi dan juga ukuran dari langkah langkah, dinyatakan dalam jumlah bit yang ada dalam satu kata (digital words), ukuran langkah terkecil sebagai persen dari skala penuh atau dapat juga langkah terkecil dalam miliVolt (untuk skala penuh yang dihasilkan).
2) Akurasi
Adalah jumlah dari semua kesalahan, misalnya kesalahan non linieritas, skala penuh, skala nol, dan lain-lain. Dapat juga menyatakan perbedaan antara tegangan masukan analog secara teoritis yang dibutuhkan untuk menghasilkan suatu kode biner tertentu terhadap tegangan masukan nyata yang menghasilkan tegangan kode biner tersebut.
3) Waktu Konversi
Adalah waktu yang dibutuhkan untuk mengubah setiap sampel ke bentuk digital, atau yang diperlukan untuk menyelesaikan suatu konversi.
4) Fungsi Transfer Ideal ADC
Fungsi transfer ideal untuk konverter analog-ke-digital (ADC, analog-to-digital converter) berbentuk garis lurus. Bentuk ideal garis lurus hanya dapat dicapai dengan konverter data beresolusi tak-hingga. Karena tidak mungkin mendapatkan resolusi tak hingga, maka secara praktis fungsi tranfer ideal tersebut berbentuk gelombang tangga seragam seperti terlihat pada Gambar 1.5 Semakin tinggi resolusi ADC, semakin halus gelombang tangga tersebut. ADC ideal secara unik dapat merepresentasikan seluruh rentang masukan analog tertentu dengan sejumlah kode keluaran digital. Pada gambar 1 ditunjukkan bahwa setiap kode digital merepresentasikan sebagian dari rentang masukan analog total. Oleh karena skala analog bersifat kontinyu sedangkan kode digital bersifat diskrit, maka ada proses kuantisasi yang menimbulkan kekeliruan (galat). Apabila jumlah kode diskritnya (yang mewakili rentang masukan analog) ditambah, maka lebar undak (step width) akan semakin kecil dan fungsi transfer akan mendekati garis lurus ideal. Lebar satu undak (step) didefinisikan sebagai 1 LSB (least significant bit) dan unit ini digunakan sebagai unit rujukan untuk besaran-besaran lain dalam spesifikasi peranti konversi data. Unit 1 LSB itu juga digunakan untuk mengukur resolusi konverter karena ia juga menggambarkan jumlah bagian atau unit dalam rentang analog penuh.
Resolusi ADC selalu dinyatakan sebagai jumlah bit-bit dalam kode keluaran digitalnya. Misalnya, ADC dengan resolusi n-bit memiliki 2n kode digital yang mungkin dan berarti juga memiliki 2n tingkat undak (step level). Meskipun demikian, karena undak pertama dan undak terakhir hanya setengah dari lebar penuh, maka rentang skala-penuh (FSR, full-scale range) dibagi dalam (2n -1) lebar undak. Karenanya,
2𝑛−1
Untuk converter n-bit.

Gambar 4. Fungsi Transfer Ideal ADC
4. Komunikasi
Komunikasi merupakan suatu kata yang dapat diartikan sebagai cara untuk menyampaikan atau menyebarluaskan data dan informasi. Komunikasi data adalah bagian dari komunikasi yang secara khusus berkenaan dengan transmisi atau pemindahan data dan informasi diantara komputer-komputer dan piranti-piranti yang lain dalam bentuk digital yang dikirim melalui media komunikasi data. Data berarti informasi yang disajikan oleh isyarat digital.
4.1 Universal Asynchronous Receiver Transmitter
Universal Asynchronous Receiver Transmitter (UART) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit- bit serial. UART berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.
UART terdiri dari:
1. Penyangga (buffer) Transmit/Receive
2. Pengendali (control) Transmit/Receive
3. Penyangga Bus Data
4. Logika Kendali Read/Write
5. Kendali Modem
Dalam pengiriman data, clock antara pengirim dan penerima harus sama karena paket data dikirim tiap bit mengandalkan clock tersebut. Inilah salah satu keuntungan model asynchronous dalam pengiriman data karena dengan hanya satu kabel transmisi maka data dapat dikirimkan.

Gambar 5. Format Data UART
Terdapat beberapa parameter yang dapat diatur yaitu start bit, parity bit, dan stop bit. Pengaturan ini harus sama antara pengirim dan penerima. Data yang dikirim adalah data berukuran 8 bit atau 1 byte. Jika ditambah dengan 3 parameter diatas maka total bit data yang dikirim adalah 11 bit. Dari format data inilah setiap data yang terbaca dapat diterjemahkan menjadi bit-bit yang merepresentasikan data tertentu
Sebenarnya tidak semua terdapat error dalam pengiriman data UART. Terjadinya error hanya terjadi ketika kita menggunakan clock mikrokontroler untuk nilai tertentu saja. Pada paket data UART, clock yang dikirimkan bergantung dari nilai baud rate. Karena protokol ini universal, maka baud rate yang ada adalah nilai- nilai tetap yang tidak bisa diubah ubah dari kisaran nilai 110 sampai 11059200 bps (bit per sekon) atau lebih. Semakin cepat clock yang digunakan maka baud rate akan semakin cepat juga.
6. DHT 22 Sensor
Sensor DHT22 (juga dikenal sebagai AM2302) adalah sensor digital yang mampu mengukur suhu dan kelembapan dengan tingkat akurasi yang tinggi. Sensor ini sering digunakan dalam berbagai aplikasi monitoring lingkungan, seperti pada sistem rumah pintar, proyek IoT, serta pengawasan suhu dan kelembapan pada ruang tertutup.
Kelebihan sensor DHT22 dibandingkan DHT11 adalah jangkauan pengukuran suhu dan kelembapan yang lebih luas serta akurasi yang lebih baik, meskipun dengan harga yang sedikit lebih tinggi.

Gambar 6. Sensor DHT 22
1. Mikrokontroler
Mikrokontroler merupakan suatu Integrated Circuit (IC) yang berisi Central Processing Unit (CPU), Read Only Memory (ROM), Random Access Memory (RAM), dan Input/Output. Mikrokontroler melakukan proses berfikir berdasarkan program yang telah diinput.
Raspberry Pi Pico adalah mikrokontroler yang dikembangkan oleh Raspberry Pi Foundation dan dirilis pada tahun 2021. Pico menggunakan chip RP2040, yaitu mikrokontroler 32-bit berbasis ARM Cortex-M0+ dual-core dengan kecepatan clock hingga 133 MHz. Chip ini dirancang untuk efisiensi tinggi dan fleksibilitas penggunaan pada berbagai aplikasi tertanam.
Gambar 1. Konfigurasi Pin Raspberry Pi Pico
Gambar di atas dijelaskan sebagai berikut :
a) Jumlah dan Jenis Pin
Raspberry Pi Pico memiliki 40 pin fisik, dengan 26 pin GPIO multifungsi, serta sisanya dialokasikan untuk power, ground, dan fungsi khusus.
b) Fungsi Utama Pin GPIO
Setiap pin GPIO dapat dikonfigurasi untuk berbagai fungsi, antara lain:
a) Digital Input/Output (I/O)
b) Analog Input (ADC) pada GPIO26, GPIO27, dan GPIO28
c) PWM (Pulse Width Modulation)
d) Komunikasi Serial: UART (Universal Asynchronous Receiver Transmitter), I2C (Inter-Integrated Circuit), SPI (Serial Peripheral Interface).
c) Konfigurasi Pin-Komunikasi Berdasarkan Gambar
UART
1. UART0: TX: GPIO0, RX: GPIO1
2. UART1: TX: GPIO8, GPIO4, RX: GPIO9, GPIO5
UART ini digunakan untuk komunikasi serial antar-Pico atau ke modul lain.
I2C
1. I2C0:
• SDA: GPIO0, GPIO4
• SCL: GPIO1, GPIO5
2. I2C1:
• SDA: GPIO2, GPIO6, GPIO14, GPIO18, GPIO26
• SCL: GPIO3, GPIO7, GPIO15, GPIO19, GPIO27
I2C cocok untuk komunikasi sensor-sensor seperti DHT22 atau modul OLED.
SPI
1. SPI0:
• TX: GPIO3, GPIO7
• RX: GPIO0, GPIO4
• SCK: GPIO2, GPIO6
• CSn: GPIO1, GPIO5
2. SPI1:
• TX: GPIO11
• RX: GPIO12
• SCK: GPIO10
• CSn: GPIO9
SPI umumnya digunakan untuk komunikasi cepat dengan modul seperti SD Card.
ADC (Analog to Digital Converter)
• ADC0: GPIO26
• ADC1: GPIO27
• ADC2: GPIO28
Pin ini sangat penting untuk membaca sinyal analog seperti dari sensor debu (dengan tegangan analog) atau sensor arus ACS712.
4. Power dan Ground
• VBUS (Pin 40): Tegangan input dari USB (sekitar 5V)
• 3V3 (OUT): Output tegangan 3.3V, digunakan untuk memberi daya ke sensor eksternal
• VSYS: Tegangan sistem (biasanya 5V dari USB atau sumber lainnya)
SPESIFIKASI | |
Raspberry | |
Microcontroller | Pi Pico RP2040 |
Operating Voltage | 3.3V |
InputVoltage (recommended) | 5V |
Input Voltage (limit) | 1.8-5.5V |
Digital I/O Pins | 26 (semua bisa digunakan sebagai digital i/o) |
PWM Digital I/O Pins | 16 channels (8 independent PWM slices) | ||
Analog Input Pins | 3 (ADC 12-bit) | ||
DC Current per I/O Pin | Max 15 mA | ||
DC Current for 3.3V Pin | max 300 mA total (dari regulator onboard) | ||
Flash Memory | 2 MB (QSPI Flash) | ||
SRAM |
| ||
Clock Speed | 133 MHz (default, up to 133 MHz) | ||
LED_BUILTIN | GPIO 25 | ||
Length | 51 mm | ||
Width | 21 mm | ||
Weight | ±3 gram |
Table 1. Spesifikasi Rasberry Pi Pico
Raspberry Pi Pico dapat diaktifkan melalui koneksi micro USB atau melalui catu daya eksternal melalui pin VSYS. Daya eksternal (non-USB) dapat berasal dari adaptor AC-ke-DC atau dari baterai. Daya tersebut dapat disambungkan ke pin VSYS dan GND pada header pin Pico. Kisaran tegangan input yang disarankan untuk Pico adalah 1.8V hingga 5.5V, namun sumber tegangan umum yang digunakan adalah 5V dari USB. Memberikan tegangan lebih dari batas ini dapat merusak regulator internal atau komponen lainnya.
Jenis Jenis Pin daya adalah sebagai berikut:
1. VSYS. Tegangan masukan utama ke board Raspberry Pi Pico, dapat berasal dari USB atau sumber eksternal (seperti baterai atau adaptor DC).
2. VBUS. Pin ini menyediakan tegangan 5V langsung dari koneksi USB saat board terhubung ke komputer atau adaptor USB.
3. 3V3 (OUT). Pasokan daya 3.3V yang dihasilkan oleh regulator internal dan digunakan untuk mikrokontroler serta perangkat eksternal. Total arus maksimal sekitar 300 mA.
4. GND. Pin ground (tanah) yang digunakan sebagai referensi tegangan.
Input dan Output Raspberry Pi Pico memiliki 26 pin GPIO (General Purpose Input Output) multifungsi yang dapat dikonfigurasi sebagai input atau output menggunakan fungsi-fungsi dari pustaka seperti MicroPython atau C SDK. Pin-pin ini beroperasi dengan tegangan logika 3.3V. Setiap pin dapat memberikan atau menerima arus maksimal sekitar 15 mA, dan total arus output dari semua pin tidak boleh melebihi batas regulator internal.
Beberapa pin juga memiliki fungsi khusus:
1. UART (Serial): Terdapat dua UART (default di GPIO0 dan GPIO1) yang dapat digunakan untuk komunikasi serial TTL. UART dapat digunakan untuk komunikasi dengan sensor, komputer, atau modul komunikasi seperti Bluetooth.
2. Interrupt Eksternal: Hampir semua GPIO mendukung interrupt yang dapat dikonfigurasi untuk memicu berdasarkan perubahan logika tinggi atau rendah, mirip dengan fungsi attachInterrupt() pada Arduino.
3. PWM: Raspberry Pi Pico memiliki 16 channel PWM, dengan 8 PWM slice yang dapat dipetakan ke berbagai GPIO. Fungsi ini mendukung output PWM untuk kontrol kecepatan motor, kecerahan LED, dsb.
4. SPI: Pico memiliki dua antarmuka SPI yang dapat dikonfigurasi melalui berbagai kombinasi GPIO. SPI digunakan untuk komunikasi dengan perangkat seperti sensor, layar, dan memori eksternal.
5. I2C: Terdapat dua antarmuka I2C, yang bisa digunakan pada hampir semua GPIO (karena fungsi pin fleksibel). I2C sangat berguna untuk menghubungkan berbagai sensor dan modul dengan alamat yang unik.
6. LED: GPIO 25. Raspberry Pi Pico memiliki satu LED bawaan yang terhubung ke GPIO 25. LED akan menyala jika pin ini diberi nilai logika HIGH dan mati jika diberi logika LOW.
Raspberry Pi Pico memiliki 3 pin input analog: ADC0 (GPIO26), ADC1 (GPIO27), dan ADC2 (GPIO28). Ketiganya terhubung ke ADC 12-bit, yang memberikan resolusi hingga 4096 nilai berbeda. Selain itu, terdapat pin ADC4 internal yang digunakan untuk pembacaan suhu internal chip.
2. PWM
PWM merupakan sebuah mekanisma untuk membangkitkan sinyal keluaran yang periodenya berulang antara high dan low, dimana kita dapat mengontrol durasi sinyal sesuai dengan yang kita inginkan. Duty cycle merupakan presentase periode sinyal high dan low. Presentase duty cycle bebanding lurus dengan tegangan rata- rata yang dihasilkan.
2.1 Prinsip dasar PWM
Modulasi lebar pulsa (PWM) dicapai dengan bantuan gelombang kotak yang mana duty cycle gelombang dapat diubah ubah untuk mendapatkan keluaran bervariasi yang merupakan nilai rata- rata dari gelombang tersebut.
Gambar 2. Bentuk Gelombang Kotak
PWM bekerja sebagai switching power suplai untuk mengontrol on dan off. Tegangan dc dikonversi menjadi sinyal kotak bolak balik, saat on mendekati tegangan puncak dan saat off mrnjadi nol (0) volt. Jika frekuensi switching cukup tinggi maka teemperatur air yang dikendalikan akan semakin sesuai dengan yang diharapkan. Dengan mengatur duty cycle dari sinyal (modulasi lebar pulsa dari sinyal disebabkan oleh PWM). Terlihat pada gambar di bawah sinyal ref adalah sinyal tegangan dc yang dikonversi oleh sinyal gergaji dan menghasilkan sinyal kotak
Gambar 3. Sinyal Referensi
Informasi analog dapat dikirimkan dengan menggunakan pulsa tegangan atau pulsa arus. Dengan modulasi pulsa, pembawa informasi terdiri dari pulsa persegi yang berulang. Salah satu teknik modulasi yang sering digunakan adalah teknik modulasi durasi atur lebar dari waktu tunda positif ataupun waktu tunda negatif pulsa persegi tersebut. Untuk membangkitkan sinyal PWM adalah dengan menggunakan fungsi timer/counter yang dibandingkan nilainya dengan sebuah register tertentu.
3. ADC
Sistem mikrokontroler hanya dapat mengolah data dalam bentuk bine. Oleh sebab itu setiap data analog yang akan diproses oleh mikrokontroler harus diubah kedalam bentuk kode biner dimana Pengubahan data analog kedalam bentuk biner ditangani oleh piranti ADC. Tegangan masukan ADC didapatkan dari tranducer. Tranducer adalah pengubah besaran kontinu, dalam hal ini adalah tegangan DC 12 Volt. Tegangan listrik yang dihasilkan oleh tranducer yang berubah secara kontinu pada suatu kisaran tertentu disebut tegangan analog, dan tegangan analog ini diubah oleh ADC menjadi bentuk digital yang sebanding dengan tegangan analognya.
Ada 4 karakteristik yang perlu diperhatikan dalam pemilihan komponen ADC, antara lain :
1) Resolusi
Merupakan spesifikasi terpenting untuk ADC, yaitu jumlah langkah dari sinyal skala penuh yang dapat dibagi dan juga ukuran dari langkah langkah, dinyatakan dalam jumlah bit yang ada dalam satu kata (digital words), ukuran langkah terkecil sebagai persen dari skala penuh atau dapat juga langkah terkecil dalam miliVolt (untuk skala penuh yang dihasilkan).
2) Akurasi
Adalah jumlah dari semua kesalahan, misalnya kesalahan non linieritas, skala penuh, skala nol, dan lain-lain. Dapat juga menyatakan perbedaan antara tegangan masukan analog secara teoritis yang dibutuhkan untuk menghasilkan suatu kode biner tertentu terhadap tegangan masukan nyata yang menghasilkan tegangan kode biner tersebut.
3) Waktu Konversi
Adalah waktu yang dibutuhkan untuk mengubah setiap sampel ke bentuk digital, atau yang diperlukan untuk menyelesaikan suatu konversi.
4) Fungsi Transfer Ideal ADC
Fungsi transfer ideal untuk konverter analog-ke-digital (ADC, analog-to-digital converter) berbentuk garis lurus. Bentuk ideal garis lurus hanya dapat dicapai dengan konverter data beresolusi tak-hingga. Karena tidak mungkin mendapatkan resolusi tak hingga, maka secara praktis fungsi tranfer ideal tersebut berbentuk gelombang tangga seragam seperti terlihat pada Gambar 1.5 Semakin tinggi resolusi ADC, semakin halus gelombang tangga tersebut. ADC ideal secara unik dapat merepresentasikan seluruh rentang masukan analog tertentu dengan sejumlah kode keluaran digital. Pada gambar 1 ditunjukkan bahwa setiap kode digital merepresentasikan sebagian dari rentang masukan analog total. Oleh karena skala analog bersifat kontinyu sedangkan kode digital bersifat diskrit, maka ada proses kuantisasi yang menimbulkan kekeliruan (galat). Apabila jumlah kode diskritnya (yang mewakili rentang masukan analog) ditambah, maka lebar undak (step width) akan semakin kecil dan fungsi transfer akan mendekati garis lurus ideal. Lebar satu undak (step) didefinisikan sebagai 1 LSB (least significant bit) dan unit ini digunakan sebagai unit rujukan untuk besaran-besaran lain dalam spesifikasi peranti konversi data. Unit 1 LSB itu juga digunakan untuk mengukur resolusi konverter karena ia juga menggambarkan jumlah bagian atau unit dalam rentang analog penuh.
Resolusi ADC selalu dinyatakan sebagai jumlah bit-bit dalam kode keluaran digitalnya. Misalnya, ADC dengan resolusi n-bit memiliki 2n kode digital yang mungkin dan berarti juga memiliki 2n tingkat undak (step level). Meskipun demikian, karena undak pertama dan undak terakhir hanya setengah dari lebar penuh, maka rentang skala-penuh (FSR, full-scale range) dibagi dalam (2n -1) lebar undak. Karenanya,
2𝑛−1
Untuk converter n-bit.
Gambar 4. Fungsi Transfer Ideal ADC
4. Komunikasi
Komunikasi merupakan suatu kata yang dapat diartikan sebagai cara untuk menyampaikan atau menyebarluaskan data dan informasi. Komunikasi data adalah bagian dari komunikasi yang secara khusus berkenaan dengan transmisi atau pemindahan data dan informasi diantara komputer-komputer dan piranti-piranti yang lain dalam bentuk digital yang dikirim melalui media komunikasi data. Data berarti informasi yang disajikan oleh isyarat digital.
4.1 Universal Asynchronous Receiver Transmitter
Universal Asynchronous Receiver Transmitter (UART) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit- bit serial. UART berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.
UART terdiri dari:
1. Penyangga (buffer) Transmit/Receive
2. Pengendali (control) Transmit/Receive
3. Penyangga Bus Data
4. Logika Kendali Read/Write
5. Kendali Modem
Dalam pengiriman data, clock antara pengirim dan penerima harus sama karena paket data dikirim tiap bit mengandalkan clock tersebut. Inilah salah satu keuntungan model asynchronous dalam pengiriman data karena dengan hanya satu kabel transmisi maka data dapat dikirimkan.
Gambar 5. Format Data UART
Terdapat beberapa parameter yang dapat diatur yaitu start bit, parity bit, dan stop bit. Pengaturan ini harus sama antara pengirim dan penerima. Data yang dikirim adalah data berukuran 8 bit atau 1 byte. Jika ditambah dengan 3 parameter diatas maka total bit data yang dikirim adalah 11 bit. Dari format data inilah setiap data yang terbaca dapat diterjemahkan menjadi bit-bit yang merepresentasikan data tertentu
Sebenarnya tidak semua terdapat error dalam pengiriman data UART. Terjadinya error hanya terjadi ketika kita menggunakan clock mikrokontroler untuk nilai tertentu saja. Pada paket data UART, clock yang dikirimkan bergantung dari nilai baud rate. Karena protokol ini universal, maka baud rate yang ada adalah nilai- nilai tetap yang tidak bisa diubah ubah dari kisaran nilai 110 sampai 11059200 bps (bit per sekon) atau lebih. Semakin cepat clock yang digunakan maka baud rate akan semakin cepat juga.
6. DHT 22 Sensor
Sensor DHT22 (juga dikenal sebagai AM2302) adalah sensor digital yang mampu mengukur suhu dan kelembapan dengan tingkat akurasi yang tinggi. Sensor ini sering digunakan dalam berbagai aplikasi monitoring lingkungan, seperti pada sistem rumah pintar, proyek IoT, serta pengawasan suhu dan kelembapan pada ruang tertutup.
Kelebihan sensor DHT22 dibandingkan DHT11 adalah jangkauan pengukuran suhu dan kelembapan yang lebih luas serta akurasi yang lebih baik, meskipun dengan harga yang sedikit lebih tinggi.
Gambar 6. Sensor DHT 22
Spesifikasi DHT22:
1. Tegangan kerja: 3.3V – 6V
2. Arus maksimum: 2.5 mA saat mengukur
3. Periode sampling: 2 detik
4. Antarmuka komunikasi: Single-bus digital (1-wire)
5. Rentang suhu: -40°C hingga 80°C (akurasi ±0.5°C)
6. Rentang kelembapan: 0% hingga 100% RH (akurasi ±2% RH)
7. Resolusi: Suhu: 0.1°C, Kelembapan: 0.1% RH
8. Dimensi modul: sekitar 15.1mm x 25mm x 7.7mm
6. 1 Konfigurasi pin sensor DHT11
6. 1 Konfigurasi pin sensor DHT11
Tabel Konfigurasi Pin DHT22
Versi Modul (3 Pin):
Pin
Nama Pin
Fungsi
Keterangan
1
VCC
Tegangan input (3.3 – 5V)
Dihubungkan ke power supply
2
DATA
Jalur data digital (satu arah)
Dihubungkan ke pin GPIO mikrokontroler
3
GND
Ground
Dihubungkan ke ground sistem
Versi Komponen (4 Pin):
Versi Modul (3 Pin):
Pin | Nama Pin | Fungsi | Keterangan |
1 | VCC | Tegangan input (3.3 – 5V) | Dihubungkan ke power supply |
2 | DATA | Jalur data digital (satu arah) | Dihubungkan ke pin GPIO mikrokontroler |
3 | GND | Ground | Dihubungkan ke ground sistem |
Versi Komponen (4 Pin):
Pin | Nama Pin | Fungsi | Keterangan |
1 | VCC | Tegangan input (3.3 – 5V) | Dihubungkan ke power supply |
2 | DATA | Jalur data digital (satu arah) | Butuh resistor pull-up 4.7k–10kΩ ke VCC |
3 | NC | Not Connected | Tidak digunakan |
4 | GND | Ground | Dihubungkan ke ground sistem |

Gambar 7. Susunan Pin DHT 22
Sensor DHT22 memiliki 2 versi, yatu versi 4 pin dan versi 3 pin. Tidak ada perbedaan karakteristik dari 2 versi ini. Pada versi 4 pin,. Pin 1 adalah tegangan sumber, berkisar antara 3V sampai 5V. Pin 2 adalalah data keluaran (output) . Pin ke 3 adalah pin NC (normall y close ) alias tidak digunakan dan pin ke 4 adalah Ground. Sedangkan pada versi 3 kaki, pin 1 adalah VCC antara 3V sampai 5V, pin 2 adalah data keluaran dan pin 3 adalah Ground.
Grafik Respon :

Gambar 8. Grafik DHT 22
7. LDR Sensor
Light Dependent Resistor (LDR) adalah jenis Resistor yang nilai hambatan atau nilai resistansinya tergantung pada intensitas cahaya yang diterimanya. Nilai Hambatan LDR akan menurun pada saat cahaya terang dan nilai Hambatannya akan menjadi tinggi jika dalam kondisi gelap. Fungsi LDR (Light Dependent Resistor) adalah untuk menghantarkan arus listrik jika menerima sejumlah intensitas cahaya (Kondisi Terang) dan menghambat arus listrik dalam kondisi gelap.
Naik turunnya nilai Hambatan akan sebanding dengan jumlah cahaya yang diterimanya. Pada umumnya, Nilai Hambatan LDR akan mencapai 200 Kilo Ohm (kΩ) pada kondisi gelap dan menurun menjadi 500 Ohm (Ω) pada Kondisi Cahaya Terang.
LDR (Light Dependent Resistor) yang merupakan Komponen Elektronika peka cahaya ini sering digunakan atau diaplikasikan dalam Rangkaian Elektronika sebagai sensor pada Lampu Penerang Jalan, Lampu Kamar Tidur, Rangkaian Anti Maling, Shutter Kamera, Alarm dan lain sebagainya.
Adapun grafik respon sensor adalah:

Gambar 9. Grafik Sensitifitas LDR

Gambar 10. Grafik Spektral LD
8. Sensor ACS 712
Sensor ACS712 adalah sensor arus berbasis efek Hall yang dapat digunakan untuk mengukur arus listrik AC maupun DC secara akurat. Sensor ini bekerja dengan membaca medan magnet yang dihasilkan oleh aliran arus listrik dan mengubahnya menjadi sinyal tegangan analog. Sensor ini sering digunakan dalam proyek monitoring arus beban motor, sistem tenaga, serta aplikasi proteksi sirkuit.

Gambar 11. Sensor ACS 712

Gambar 12. Pin Sensor ACS 712
Sensor ACS712 umumnya tersedia dalam bentuk modul dengan 3 pin utama, yaitu:
1. VCC : Tegangan input 5V dari mikrokontroler
2. OUT : Output analog berupa tegangan proporsional terhadap arus
3. GND : Ground
Gambar 7. Susunan Pin DHT 22
Sensor DHT22 memiliki 2 versi, yatu versi 4 pin dan versi 3 pin. Tidak ada perbedaan karakteristik dari 2 versi ini. Pada versi 4 pin,. Pin 1 adalah tegangan sumber, berkisar antara 3V sampai 5V. Pin 2 adalalah data keluaran (output) . Pin ke 3 adalah pin NC (normall y close ) alias tidak digunakan dan pin ke 4 adalah Ground. Sedangkan pada versi 3 kaki, pin 1 adalah VCC antara 3V sampai 5V, pin 2 adalah data keluaran dan pin 3 adalah Ground.
Grafik Respon :
Gambar 8. Grafik DHT 22
7. LDR Sensor
Light Dependent Resistor (LDR) adalah jenis Resistor yang nilai hambatan atau nilai resistansinya tergantung pada intensitas cahaya yang diterimanya. Nilai Hambatan LDR akan menurun pada saat cahaya terang dan nilai Hambatannya akan menjadi tinggi jika dalam kondisi gelap. Fungsi LDR (Light Dependent Resistor) adalah untuk menghantarkan arus listrik jika menerima sejumlah intensitas cahaya (Kondisi Terang) dan menghambat arus listrik dalam kondisi gelap.
Naik turunnya nilai Hambatan akan sebanding dengan jumlah cahaya yang diterimanya. Pada umumnya, Nilai Hambatan LDR akan mencapai 200 Kilo Ohm (kΩ) pada kondisi gelap dan menurun menjadi 500 Ohm (Ω) pada Kondisi Cahaya Terang.
LDR (Light Dependent Resistor) yang merupakan Komponen Elektronika peka cahaya ini sering digunakan atau diaplikasikan dalam Rangkaian Elektronika sebagai sensor pada Lampu Penerang Jalan, Lampu Kamar Tidur, Rangkaian Anti Maling, Shutter Kamera, Alarm dan lain sebagainya.
Adapun grafik respon sensor adalah:
Gambar 9. Grafik Sensitifitas LDR
Gambar 10. Grafik Spektral LD
8. Sensor ACS 712
Sensor ACS712 adalah sensor arus berbasis efek Hall yang dapat digunakan untuk mengukur arus listrik AC maupun DC secara akurat. Sensor ini bekerja dengan membaca medan magnet yang dihasilkan oleh aliran arus listrik dan mengubahnya menjadi sinyal tegangan analog. Sensor ini sering digunakan dalam proyek monitoring arus beban motor, sistem tenaga, serta aplikasi proteksi sirkuit.
Gambar 11. Sensor ACS 712
Gambar 12. Pin Sensor ACS 712
Sensor ACS712 umumnya tersedia dalam bentuk modul dengan 3 pin utama, yaitu:
1. VCC : Tegangan input 5V dari mikrokontroler
2. OUT : Output analog berupa tegangan proporsional terhadap arus
3. GND : Ground
Spesifikasi:
1. Tegangan input: 5V DC
2. Arus kerja: 10 mA
3. Output: Analog (tegangan proporsional terhadap arus)
4. Tegangan output: 0V – 5V (berbanding lurus dengan arus)
5. Akurasi: ±1.5%
6. Range pengukuran:
o ACS712-05B: ±5A
o ACS712-20A: ±20A
o ACS712-30A: ±30A
7. Sensitivitas (typical):
o 185 mV/A untuk 5A
o 100 mV/A untuk 20A
o 66 mV/A untuk 30A
8. Waktu respon cepat: 5 µs
9.

Gambar 13. Grafik Sensor ACS712
9.

Gambar 14. Dust Sensor GP2Y1014AU0F
Sensor GP2Y1014AU0F adalah sensor optik yang dirancang untuk mendeteksi partikel debu dan asap di udara. Sensor ini menggunakan sinar infra merah dan fotodetektor untuk mengukur jumlah partikel yang tersebar di udara, sehingga sering digunakan dalam alat pemantauan kualitas udara, sistem HVAC, dan aplikasi IoT berbasis lingkungan.
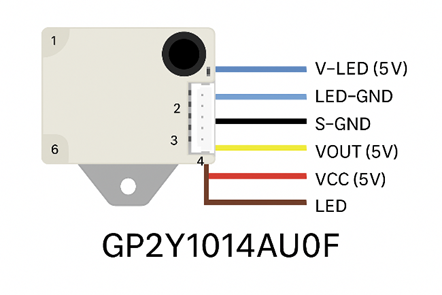
Gambar 15. Pin Dust Sensor GP2Y1014AU0F
1. Tegangan input: 5V DC
2. Arus kerja: 10 mA
3. Output: Analog (tegangan proporsional terhadap arus)
4. Tegangan output: 0V – 5V (berbanding lurus dengan arus)
5. Akurasi: ±1.5%
6. Range pengukuran:
o ACS712-05B: ±5A
o ACS712-20A: ±20A
o ACS712-30A: ±30A
7. Sensitivitas (typical):
o 185 mV/A untuk 5A
o 100 mV/A untuk 20A
o 66 mV/A untuk 30A
8. Waktu respon cepat: 5 µs
9.
Gambar 13. Grafik Sensor ACS712
9.
Gambar 14. Dust Sensor GP2Y1014AU0F
Sensor GP2Y1014AU0F adalah sensor optik yang dirancang untuk mendeteksi partikel debu dan asap di udara. Sensor ini menggunakan sinar infra merah dan fotodetektor untuk mengukur jumlah partikel yang tersebar di udara, sehingga sering digunakan dalam alat pemantauan kualitas udara, sistem HVAC, dan aplikasi IoT berbasis lingkungan.
Gambar 15. Pin Dust Sensor GP2Y1014AU0F
Spesifikasi Teknis:
1. Tegangan kerja: 5V DC
2. Tegangan output: 0 – 3.6V (analog)
3. Arus kerja: < 20 Ma
4. Sensor berbasis Infrared Light Scattering
5. Deteksi partikel: > 0.8 µm
6. Respon waktu: < 1 detik
7. Resolusi: 0.5 V / (0.1 mg/m³)
8. Dimensi: 46 × 30 × 17.6 mm
9. Berat: ~15 gram
Sensor ini memiliki 6 pin dengan fungsi sebagai berikut:

Grafik berikut menunjukkan hubungan antara tegangan output (Vo) dan konsentrasi debu di udara (mg/m³):

Gambar 16. Grafik Dust Sensor GP2Y1014AU0F
10. Pompa air dan Selang Air


Pompa air 5V
merupakan pompa submersible mini yang digerakkan oleh motor DC dengan tegangan
rendah, cocok untuk sistem berbasis mikrokontroler atau sumber daya DC seperti
baterai atau output dari sistem panel surya. Pompa ini akan mengalirkan air
melalui selang air yang diletakkan di atas atau di belakang
panel surya. Sirkulasi air menyerap panas dari panel.
Pompa air 5V
merupakan solusi efisien dan murah untuk sistem pendinginan panel surya. Dengan
sistem ini, suhu kerja panel dapat dikendalikan secara aktif sehingga efisiensi
sistem fotovoltaik dapat dipertahankan pada tingkat optimal. Penerapan sistem
ini sangat direkomendasikan untuk wilayah tropis dengan intensitas matahari
tinggi.
11. LCD

LCD atau Liquid Crystal Display adalah suatu jenis media display (tampilan) yang menggunakan kristal cair (liquid crystal) untuk menghasilkan gambar yang terlihat. Teknologi Liquid Crystal Display (LCD) atau Penampil Kristal Cair sudah banyak digunakan pada produk-produk seperti layar Laptop, layar Ponsel, layar Kalkulator, layar Jam Digital, layar Multimeter, Monitor Komputer, Televisi, layar Game portabel, layar Thermometer Digital dan produk-produk elektronik lainnya. Teknologi Display LCD ini memungkinkan produk-produk elektronik dibuat menjadi jauh lebih tipis jika dibanding dengan teknologi Tabung Sinar Katoda (Cathode Ray Tube atau CRT). Jika dibandingkan dengan teknologi CRT, LCD juga jauh lebih hemat dalam mengkonsumsi daya karena LCD bekerja berdasarkan prinsip pemblokiran cahaya sedangkan CRT berdasarkan prinsip pemancaran cahaya. Namun LCD membutuhkan lampu backlight (cahaya latar belakang) sebagai cahaya pendukung karena LCD sendiri tidak memancarkan cahaya. Beberapa jenis backlight yang umum digunakan untuk LCD diantaranya adalah backlight CCFL (Cold cathode fluorescent lamps) dan backlight LED (Light- emitting diodes). LCD atau Liquid Crystal Display pada dasarnya terdiri dari dua bagian utama yaitu bagian Backlight (Lampu Latar Belakang) dan bagian Liquid Crystal (Kristal Cair). Seperti yang disebutkan sebelumnya, LCD tidak memancarkan pencahayaan apapun, LCD hanya merefleksikan dan mentransmisikan cahaya yang melewatinya. Oleh karena itu, LCD memerlukan Backlight atau Cahaya latar belakang untuk sumber cahayanya. Cahaya Backlight tersebut pada umumnya adalah berwarna putih. Sedangkan Kristal Cair (Liquid Crystal) sendiri adalah cairan organik yang berada diantara dua lembar kaca yang memiliki permukaan transparan yang konduktif.
Bagian-bagian LCD atau Liquid Crystal Display diantaranya adalah:
· Lapisan Terpolarisasi 1 (Polarizing Film 1)
· Elektroda Positif (Positive Electrode)
· Lapisan Kristal Cair (Liquid Cristal Layer)
· Elektroda Negatif (Negative Electrode)
· Lapisan Terpolarisasi 2 (Polarizing film 2)
· Backlight atau Cermin (Backlight or Mirror)
Dibawah ini adalah gambar struktur dasar sebuah LCD:

Gambar 20.Struktur LCD
LCD yang digunakan pada Kalkulator dan Jam Tangan digital pada umumnya menggunakan Cermin untuk memantulkan cahaya alami agar dapat menghasilkan digit yang terlihat di layar. Sedangkan LCD yang lebih modern dan berkekuatan tinggi seperti TV, Laptop dan Ponsel Pintar menggunakan lampu Backlight (Lampu Latar Belakang) untuk menerangi piksel kristal cair. Lampu Backlight tersebut pada umumnya berbentuk persegi panjang atau strip lampu Flourescent atau Light Emitting Diode (LED). Cahaya putih adalah cahaya terdiri dari ratusan cahaya warna yang berbeda. Ratusan warna cahaya tersebut akan terlihat apabila cahaya putih mengalami refleksi atau perubahan arah sinar. Artinya, jika beda sudut refleksi maka berbeda pula warna cahaya yang dihasilkan.
Backlight LCD yang berwarna putih akan memberikan pencahayaan pada Kristal Cair atau Liquid Crystal. Kristal cair tersebut akan menyaring backlight yang diterimanya dan merefleksikannya sesuai dengan sudut yang diinginkan sehingga menghasilkan warna yang dibutuhkan. Sudut Kristal Cair akan berubah apabila diberikan tegangan dengan nilai tertentu. Karena dengan perubahan sudut dan penyaringan cahaya backlight pada kristal cair tersebut, cahaya backlight yang sebelumnya adalah berwarna putih dapat berubah menjadi berbagai warna.
Jika ingin menghasilkan warna putih, maka kristal cair akan dibuka selebar- lebarnya sehingga cahaya backlight yang berwarna putih dapat ditampilkan sepenuhnya. Sebaliknya, apabila ingin menampilkan warna hitam, maka kristal cair harus ditutup serapat-rapatnya sehingga tidak adalah cahaya backlight yang dapat menembus. Dan apabila menginginkan warna lainnya, maka diperlukan pengaturan sudut refleksi kristal cair yang bersangkutan.
12. Fan Cooler (Kipas 5 V)
Cooling fan 5V merupakan kipas pendingin kecil bertegangan rendah yang biasa digunakan untuk mendinginkan perangkat elektronik seperti mikrokontroler, modul sensor, atau bahkan panel surya skala kecil. Dalam proyek Cleaning and Cooler System for Photovoltaic, cooling fan 5V berfungsi untuk menurunkan suhu permukaan panel surya, agar efisiensinya tetap optimal saat terkena paparan sinar matahari langsung.
Karena beroperasi pada tegangan 5V DC, kipas ini sangat cocok dipasangkan dengan sistem berbasis Raspberry Pi Pico tanpa perlu power supply eksternal yang kompleks.

Gambar 21. Cooling fan 5V
1. Tegangan kerja: 5V DC
2. Tegangan output: 0 – 3.6V (analog)
3. Arus kerja: < 20 Ma
4. Sensor berbasis Infrared Light Scattering
5. Deteksi partikel: > 0.8 µm
6. Respon waktu: < 1 detik
7. Resolusi: 0.5 V / (0.1 mg/m³)
8. Dimensi: 46 × 30 × 17.6 mm
9. Berat: ~15 gram
Sensor ini memiliki 6 pin dengan fungsi sebagai berikut:
Grafik berikut menunjukkan hubungan antara tegangan output (Vo) dan konsentrasi debu di udara (mg/m³):
Gambar 16. Grafik Dust Sensor GP2Y1014AU0F
10. Pompa air dan Selang Air
Pompa air 5V merupakan pompa submersible mini yang digerakkan oleh motor DC dengan tegangan rendah, cocok untuk sistem berbasis mikrokontroler atau sumber daya DC seperti baterai atau output dari sistem panel surya. Pompa ini akan mengalirkan air melalui selang air yang diletakkan di atas atau di belakang panel surya. Sirkulasi air menyerap panas dari panel.
Pompa air 5V
merupakan solusi efisien dan murah untuk sistem pendinginan panel surya. Dengan
sistem ini, suhu kerja panel dapat dikendalikan secara aktif sehingga efisiensi
sistem fotovoltaik dapat dipertahankan pada tingkat optimal. Penerapan sistem
ini sangat direkomendasikan untuk wilayah tropis dengan intensitas matahari
tinggi.
11. LCD
LCD atau Liquid Crystal Display adalah suatu jenis media display (tampilan) yang menggunakan kristal cair (liquid crystal) untuk menghasilkan gambar yang terlihat. Teknologi Liquid Crystal Display (LCD) atau Penampil Kristal Cair sudah banyak digunakan pada produk-produk seperti layar Laptop, layar Ponsel, layar Kalkulator, layar Jam Digital, layar Multimeter, Monitor Komputer, Televisi, layar Game portabel, layar Thermometer Digital dan produk-produk elektronik lainnya. Teknologi Display LCD ini memungkinkan produk-produk elektronik dibuat menjadi jauh lebih tipis jika dibanding dengan teknologi Tabung Sinar Katoda (Cathode Ray Tube atau CRT). Jika dibandingkan dengan teknologi CRT, LCD juga jauh lebih hemat dalam mengkonsumsi daya karena LCD bekerja berdasarkan prinsip pemblokiran cahaya sedangkan CRT berdasarkan prinsip pemancaran cahaya. Namun LCD membutuhkan lampu backlight (cahaya latar belakang) sebagai cahaya pendukung karena LCD sendiri tidak memancarkan cahaya. Beberapa jenis backlight yang umum digunakan untuk LCD diantaranya adalah backlight CCFL (Cold cathode fluorescent lamps) dan backlight LED (Light- emitting diodes). LCD atau Liquid Crystal Display pada dasarnya terdiri dari dua bagian utama yaitu bagian Backlight (Lampu Latar Belakang) dan bagian Liquid Crystal (Kristal Cair). Seperti yang disebutkan sebelumnya, LCD tidak memancarkan pencahayaan apapun, LCD hanya merefleksikan dan mentransmisikan cahaya yang melewatinya. Oleh karena itu, LCD memerlukan Backlight atau Cahaya latar belakang untuk sumber cahayanya. Cahaya Backlight tersebut pada umumnya adalah berwarna putih. Sedangkan Kristal Cair (Liquid Crystal) sendiri adalah cairan organik yang berada diantara dua lembar kaca yang memiliki permukaan transparan yang konduktif.
Bagian-bagian LCD atau Liquid Crystal Display diantaranya adalah:
· Lapisan Terpolarisasi 1 (Polarizing Film 1)
· Elektroda Positif (Positive Electrode)
· Lapisan Kristal Cair (Liquid Cristal Layer)
· Elektroda Negatif (Negative Electrode)
· Lapisan Terpolarisasi 2 (Polarizing film 2)
· Backlight atau Cermin (Backlight or Mirror)
Dibawah ini adalah gambar struktur dasar sebuah LCD:
Gambar 20.Struktur LCD
LCD yang digunakan pada Kalkulator dan Jam Tangan digital pada umumnya menggunakan Cermin untuk memantulkan cahaya alami agar dapat menghasilkan digit yang terlihat di layar. Sedangkan LCD yang lebih modern dan berkekuatan tinggi seperti TV, Laptop dan Ponsel Pintar menggunakan lampu Backlight (Lampu Latar Belakang) untuk menerangi piksel kristal cair. Lampu Backlight tersebut pada umumnya berbentuk persegi panjang atau strip lampu Flourescent atau Light Emitting Diode (LED). Cahaya putih adalah cahaya terdiri dari ratusan cahaya warna yang berbeda. Ratusan warna cahaya tersebut akan terlihat apabila cahaya putih mengalami refleksi atau perubahan arah sinar. Artinya, jika beda sudut refleksi maka berbeda pula warna cahaya yang dihasilkan.
Backlight LCD yang berwarna putih akan memberikan pencahayaan pada Kristal Cair atau Liquid Crystal. Kristal cair tersebut akan menyaring backlight yang diterimanya dan merefleksikannya sesuai dengan sudut yang diinginkan sehingga menghasilkan warna yang dibutuhkan. Sudut Kristal Cair akan berubah apabila diberikan tegangan dengan nilai tertentu. Karena dengan perubahan sudut dan penyaringan cahaya backlight pada kristal cair tersebut, cahaya backlight yang sebelumnya adalah berwarna putih dapat berubah menjadi berbagai warna.
Jika ingin menghasilkan warna putih, maka kristal cair akan dibuka selebar- lebarnya sehingga cahaya backlight yang berwarna putih dapat ditampilkan sepenuhnya. Sebaliknya, apabila ingin menampilkan warna hitam, maka kristal cair harus ditutup serapat-rapatnya sehingga tidak adalah cahaya backlight yang dapat menembus. Dan apabila menginginkan warna lainnya, maka diperlukan pengaturan sudut refleksi kristal cair yang bersangkutan.
12. Fan Cooler (Kipas 5 V)
Cooling fan 5V merupakan kipas pendingin kecil bertegangan rendah yang biasa digunakan untuk mendinginkan perangkat elektronik seperti mikrokontroler, modul sensor, atau bahkan panel surya skala kecil. Dalam proyek Cleaning and Cooler System for Photovoltaic, cooling fan 5V berfungsi untuk menurunkan suhu permukaan panel surya, agar efisiensinya tetap optimal saat terkena paparan sinar matahari langsung.
Karena beroperasi pada tegangan 5V DC, kipas ini sangat cocok dipasangkan dengan sistem berbasis Raspberry Pi Pico tanpa perlu power supply eksternal yang kompleks.
Gambar 21. Cooling fan 5V
Spesifikasi Umum Cooling Fan 5V:
Spesifikasi
Keterangan
Tegangan Operasi
5V DC
Arus Kerja
± 0.08A – 0.2A (80mA – 200mA tergantung tipe)
Daya
± 0.4W – 1W
Dimensi Umum
25x25x10 mm / 30x30x10 mm / 40x40x10 mm
Kecepatan Putar (RPM)
± 4000 – 7000 RPM (tergantung tipe)
Aliran Udara (Airflow)
± 3 – 8 CFM (cubic feet per minute)
Kebisingan (Noise)
± 20 – 28 dB
Jenis Bantalan
Sleeve bearing / Ball bearing
Jenis Konektor
2-pin atau 3-pin
Spesifikasi | Keterangan |
Tegangan Operasi | 5V DC |
Arus Kerja | ± 0.08A – 0.2A (80mA – 200mA tergantung tipe) |
Daya | ± 0.4W – 1W |
Dimensi Umum | 25x25x10 mm / 30x30x10 mm / 40x40x10 mm |
Kecepatan Putar (RPM) | ± 4000 – 7000 RPM (tergantung tipe) |
Aliran Udara (Airflow) | ± 3 – 8 CFM (cubic feet per minute) |
Kebisingan (Noise) | ± 20 – 28 dB |
Jenis Bantalan | Sleeve bearing / Ball bearing |
Jenis Konektor | 2-pin atau 3-pin |
Jenis-Jenis Fan Cooling 5V
Berdasarkan Bentuk & Dimensi
Jenis
Ukuran Umum (mm)
Kegunaan
Mini Cooling Fan
25x25x10, 30x30x10
Proyek elektronik kecil, sensor, PCB, Raspberry Pi
Small Case Fan
40x40x10, 50x50x10
Pendinginan mikrokontroler, panel PV kecil
Medium Case Fan
60x60x10, 80x80x10
Untuk aplikasi pendinginan yang lebih besar (jarang 5V)
Blower Fan
50x50x15, bentuk persegi panjang
Pendinginan spesifik area → angin terfokus
Jenis | Ukuran Umum (mm) | Kegunaan |
Mini Cooling Fan | 25x25x10, 30x30x10 | Proyek elektronik kecil, sensor, PCB, Raspberry Pi |
Small Case Fan | 40x40x10, 50x50x10 | Pendinginan mikrokontroler, panel PV kecil |
Medium Case Fan | 60x60x10, 80x80x10 | Untuk aplikasi pendinginan yang lebih besar (jarang 5V) |
Blower Fan | 50x50x15, bentuk persegi panjang | Pendinginan spesifik area → angin terfokus |
Berdasarkan Jumlah Kabel (Fitur Kontrolnya)
Jumlah Kabel
Fungsi
Contoh
2 Pin (Merah-Hitam)
On/Off biasa → dikendalikan dengan relay/MOSFET
Mini Fan 5V biasa
3 Pin (Merah-Hitam-Kuning)
PWM Control → bisa atur kecepatan fan via Raspberry Pi atau Arduino
Fan PC ukuran kecil
4 Pin (Merah-Hitam-Kuning-Biru)
Lebih jarang untuk 5V → biasa dipakai untuk kontrol fan komputer yang lebih besar
Biasanya digunakan di motherboard PC
Jumlah Kabel | Fungsi | Contoh |
2 Pin (Merah-Hitam) | On/Off biasa → dikendalikan dengan relay/MOSFET | Mini Fan 5V biasa |
3 Pin (Merah-Hitam-Kuning) | PWM Control → bisa atur kecepatan fan via Raspberry Pi atau Arduino | Fan PC ukuran kecil |
4 Pin (Merah-Hitam-Kuning-Biru) | Lebih jarang untuk 5V → biasa dipakai untuk kontrol fan komputer yang lebih besar | Biasanya digunakan di motherboard PC |
Berdasarkan Jenis Bantalan (Bearing)
Jenis Bearing
Karakteristik
Cocok Untuk
Sleeve Bearing
Lebih murah, umur pendek, suara lebih kasar
Proyek prototipe, jangka pendek
Ball Bearing
Lebih awet, suara lebih halus, torsi lebih baik
Sistem otomatis jangka panjang
Jenis Bearing | Karakteristik | Cocok Untuk |
Sleeve Bearing | Lebih murah, umur pendek, suara lebih kasar | Proyek prototipe, jangka pendek |
Ball Bearing | Lebih awet, suara lebih halus, torsi lebih baik | Sistem otomatis jangka panjang |
Berdasarkan Aliran Udara (Airflow)
Jenis Fan
Karakteristik
Kegunaan
Axial Fan (Kipas biasa)
Aliran udara lurus → untuk pendinginan permukaan umum
Kipas PCB, panel PV
Blower Fan (Radial)
Aliran udara menyamping → lebih terfokus
Pendinginan celah, sistem tertutup
Cooling fan 5V merupakan salah satu jenis kipas pendingin bertegangan rendah yang banyak digunakan dalam perangkat elektronik, sistem otomasi, hingga proyek energi terbarukan. Kipas ini berfungsi untuk mengalirkan udara secara aktif ke suatu permukaan atau area tertentu guna mengurangi suhu akibat panas yang dihasilkan oleh komponen atau lingkungan sekitar.
Pada sistem pembangkit listrik tenaga surya (PLTS), terutama panel fotovoltaik (PV), suhu permukaan yang terlalu tinggi dapat mengakibatkan penurunan efisiensi konversi energi. Oleh karena itu, penggunaan cooling fan 5V menjadi solusi sederhana dan hemat energi untuk menjaga suhu panel tetap dalam batas optimal, terutama pada sistem skala kecil hingga menengah.
Jenis Fan | Karakteristik | Kegunaan |
Axial Fan (Kipas biasa) | Aliran udara lurus → untuk pendinginan permukaan umum | Kipas PCB, panel PV |
Blower Fan (Radial) | Aliran udara menyamping → lebih terfokus | Pendinginan celah, sistem tertutup |
Cooling fan 5V merupakan salah satu jenis kipas pendingin bertegangan rendah yang banyak digunakan dalam perangkat elektronik, sistem otomasi, hingga proyek energi terbarukan. Kipas ini berfungsi untuk mengalirkan udara secara aktif ke suatu permukaan atau area tertentu guna mengurangi suhu akibat panas yang dihasilkan oleh komponen atau lingkungan sekitar.
Pada sistem pembangkit listrik tenaga surya (PLTS), terutama panel fotovoltaik (PV), suhu permukaan yang terlalu tinggi dapat mengakibatkan penurunan efisiensi konversi energi. Oleh karena itu, penggunaan cooling fan 5V menjadi solusi sederhana dan hemat energi untuk menjaga suhu panel tetap dalam batas optimal, terutama pada sistem skala kecil hingga menengah.
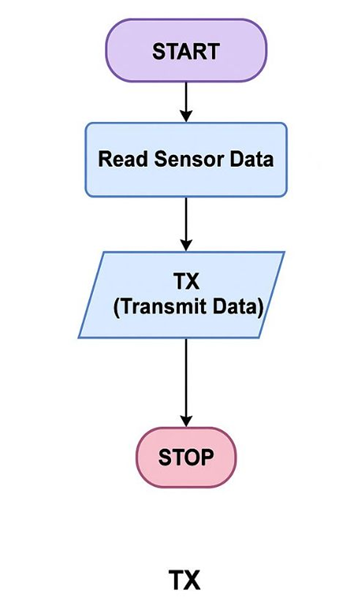
Gambar Flowchart
Transmitter
FLOWCHART TX (Transmitter) – Raspberry Pi Pico Pertama
1. START
Ini adalah titik awal dari sistem mikrokontroler pertama. Pada tahap ini, program akan: Melakukan inisialisasi pin untuk sensor-sensor (GPIO, ADC, dll). Inisialisasi komunikasi UART (UART0 atau UART1, tergantung pin). Menyiapkan variabel dan buffer untuk menyimpan data sensor.
2. Read Sensor
Data
|
Sensor |
Fungsi |
Cara Pembacaan |
|
Dust Sensor |
Mendeteksi
Konsentrasi Partikel Debu pada Panel |
ADC |
|
DHT 11 |
Mengukur Suhu
dan Kelembapan Lingkungan |
Digital, dengan
protokol 1-wire |
|
LDR |
Mengukur
Intensitas Cahaya |
ADC ( karena
resistensi diubah menjadi tegangan) |
|
ACS712 |
Mendeteksi Arus
Pada PV |
ADC ( Output
Tegangan Proporsional Arus) |
3. TX ( Transmit
Data)
Semua data sensor
dikirim melalui UART TX (contoh: GPIO 0 untuk UART0_TX).
Format data bisa berupa:
4. STOP
Setelah data dikirim, proses dapat berhenti sementara, atau: Masuk ke mode
delay/sleep ringan untuk efisiensi daya. Mengulangi proses pembacaan sensor jika looping
diaktifkan

Gambar Flowchart
Receiver
FLOWCHART RX (Receiver) – Raspberry Pi
Pico Kedua
1. START
i) Pico kedua juga akan menjalankan
inisialisasi awal, yaitu:
ii) Konfigurasi pin untuk UART RX (contoh:
GPIO 1 untuk UART0_RX).
iii) Setup pin untuk mengontrol motor DC yang
menggerakkan pompa air.
iv) Menyiapkan interrupt handler atau buffer
pembacaan data serial.
2. RX (Receive Data)
i) Pico ini menerima data serial melalui UART
RX.
ii) Data ditampung dalam buffer, lalu:
iii) Di-parse (diekstrak) menjadi variabel
seperti dust value, temperature,
dll.
iv) Konversi string ke integer/float jika
diperlukan.
Contoh data masuk:
3. Decision: Dust > Threshold OR Temp > 50°C
Logika
pengambilan keputusan dilakukan berdasarkan nilai ambang batas
|
Parameter |
Ambang Batas (Threshold) |
Aksi |
|
Dust |
>300 ppm |
Atifkan Cleaning |
|
Temp |
>50C |
Aktifkan Cooling (Karena Suhu Terlalu Tinggi) |
|
Temp |
<30C |
Hindari Penyemprotan (Terlalu Dingin) |
4. Activate Water Pump
i) Pico kedua mengaktifkan motor DC yang
menggerakkan pompa air.
ii) Output air disalurkan ke selang berlubang
kecil untuk menyemprot panel surya.
iii) Durasi penyemprotan bisa ditentukan
secara:
iv) Statis (misalnya 5 detik).
v) Dinamis (berdasarkan sensor seperti
kelembaban, arus atau pencahayaan.
5. STOP





