1. Prosedur [kembali]
2. Buat program untuk mikrokontroler STM32F103C8 di software STM32 CubeIDE.
3. Compile program dalam format hex, lalu upload ke dalam mikrokontroler.
4. Setelah program selesai di upload, jalankan simulasi rangkaian pada proteus.











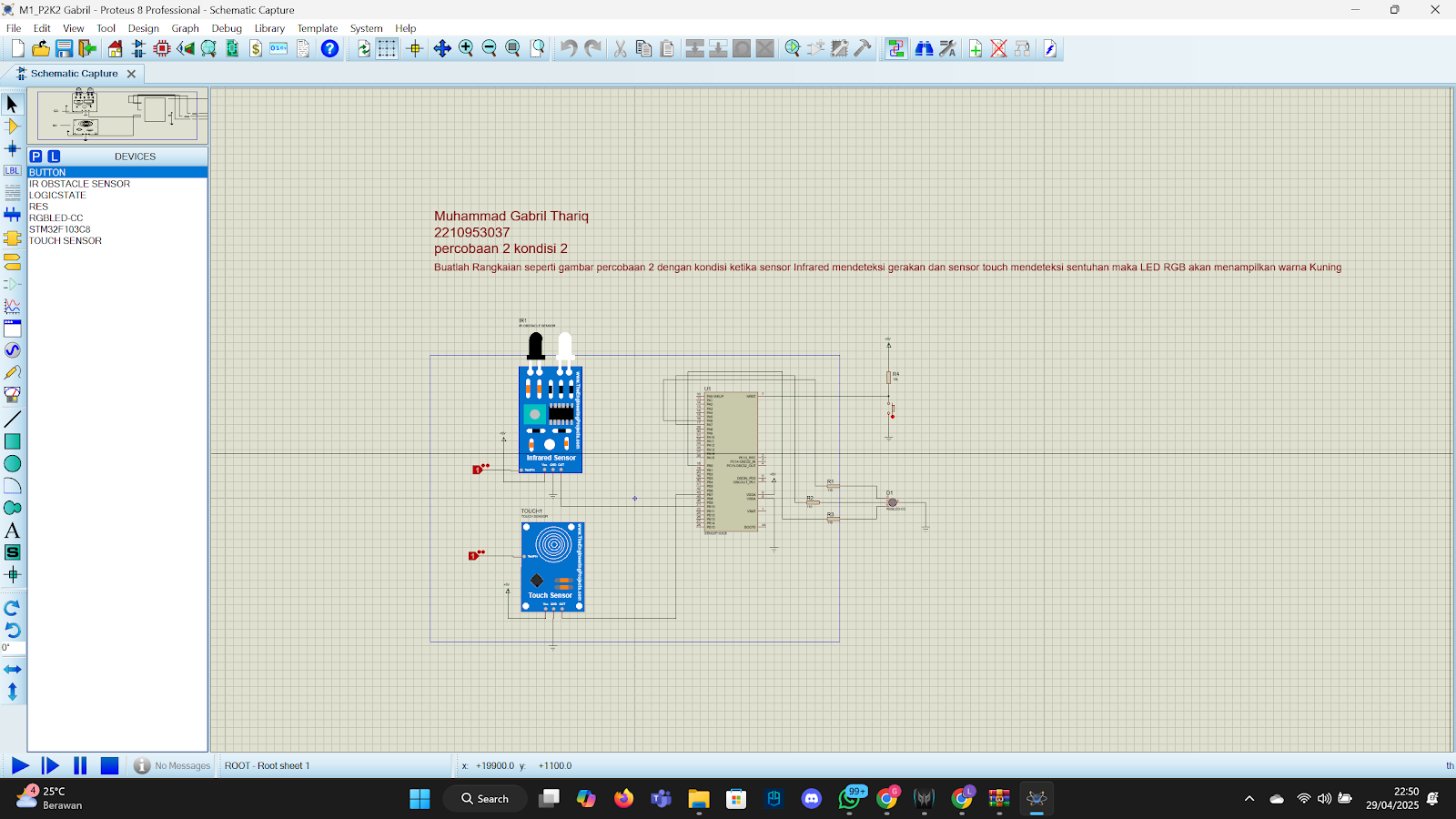
3. Rangkaian Simulasi [kembali]
- Rangkaian Simulasi Sebelum dirunning:Prinsip Kerja :Rangkaian ini menggunakan mikrokontroler STM32F103C8, dengan dua input yaitu sensor infrared dan sensor touch, serta output berupa RGB LED. Sensor infrared dihubungkan ke pin PB10, sementara sensor touch terhubung ke pin PB7. Untuk outputnya, RGB LED memiliki kaki red yang terhubung ke pin PA6, kaki green ke pin PA7, dan kaki blue ke pin PB0.
Konfigurasi dilakukan menggunakan STM32 CubeIDE, dimulai dengan membuka proyek yang telah dikerjakan. Pada tampilan pinout dan konfigurasi mikrokontroler, sesuai dengan rangkaian Proteus yang telah dibuat, input sensor infrared terhubung ke pin PB10 dan sensor touch ke pin PB7. Sementara itu, output RGB LED memiliki kaki red yang terhubung ke pin PA6, kaki green ke pin PA7, dan kaki blue ke pin PB0. Selanjutnya, dilakukan konfigurasi pada debug dengan memilih serial wire, serta pengaturan RCC dengan memilih crystal/ceramic resonator.
Setelah konfigurasi selesai, proyek disimpan dan halaman pemrograman akan ditampilkan. Karena konfigurasi sebelumnya telah dilakukan, beberapa program dasar sudah tersedia. Pemrograman dimulai dengan
#include "main.h"sebagai fungsi utama. Yang perlu ditambahkan adalah kode dalam loop utama yang berada di dalam kurung kurawal pada bagianwhile.Program ini menggunakan struktur
if-else, dengan logika sebagai berikut:- Jika sensor infrared tidak mendeteksi objek (
0), maka output yang dibaca mikrokontroler adalah menyalakan lampu hijau pada RGB LED. - Jika sensor touch tidak aktif (
0), maka output yang dibaca mikrokontroler adalah menyalakan lampu merah pada RGB LED. - Jika kedua sensor tidak aktif (
0), maka output yang dihasilkan adalah menyalakan lampu biru pada RGB LED. - Jika kedua sensor aktif (
1), maka output yang dihasilkan adalah menyalakan lampu kuning pada RGB LED, yang merupakan perpaduan antara merah dan hijau.
Setelah pemrograman selesai, program dikompilasi ke dalam format hex dan dilakukan proses build untuk menghasilkan file hex. File ini kemudian diunggah ke dalam mikrokontroler pada Proteus.
Saat rangkaian dijalankan, kondisi awal ketika kedua sensor tidak aktif (
0) akan membuat RGB LED menyala dengan warna biru. Jika sensor infrared tidak aktif (0), tetapi sensor touch aktif (1), maka LED akan menyala dengan warna hijau. Jika sensor infrared aktif (1), tetapi sensor touch tidak aktif (0), maka LED akan menyala dengan warna merah. Dan jika kedua sensor aktif (1), maka LED akan menyala dengan warna kuning sebagai hasil perpaduan merah dan hijau. - Jika sensor infrared tidak mendeteksi objek (

- Flowchart


- Listing Program
- #include "main.void SystemClock_Config(void);static void MX_GPIO_Init(void);int main(void){HAL_Init();SystemClock_Config();MX_GPIO_Init();while (1){uint8_t ir_status = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_10); // Membaca IR sensor (PB10)uint8_t touch_status = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7); // Membaca Touch Sensor (PB7)if (ir_status == GPIO_PIN_SET && touch_status == GPIO_PIN_SET) {// LED Kuning (Merah + Hijau) jika IR dan Touch aktifHAL_GPIO_WritePin(GPIOA, GPIO_PIN_6, GPIO_PIN_SET); // RHAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_SET); // GHAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET); // B mati} else if (ir_status == GPIO_PIN_SET) {// LED Merah jika hanya IR aktifHAL_GPIO_WritePin(GPIOA, GPIO_PIN_6, GPIO_PIN_SET); // RHAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_RESET); // G matiHAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET); // B mati} else if (touch_status == GPIO_PIN_SET) {// LED Hijau jika hanya Touch aktifHAL_GPIO_WritePin(GPIOA, GPIO_PIN_6, GPIO_PIN_RESET); // R matiHAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_SET); // GHAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET); // B mati} else {// LED Biru jika tidak ada sensor yang aktifHAL_GPIO_WritePin(GPIOA, GPIO_PIN_6, GPIO_PIN_RESET); // R matiHAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_RESET); // G matiHAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET); // B}HAL_Delay(10); // Delay kecil untuk stabilisasi pembacaan sensor}}void SystemClock_Config(void){RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK){Error_Handler();}}static void MX_GPIO_Init(void){GPIO_InitTypeDef GPIO_InitStruct = {0};__HAL_RCC_GPIOD_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();HAL_GPIO_WritePin(GPIOA, GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);GPIO_InitStruct.Pin = GPIO_PIN_0;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);GPIO_InitStruct.Pin = GPIO_PIN_10|GPIO_PIN_7;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);}void Error_Handler(void){__disable_irq();while (1){}}



{kind=link}
{kind=link}
Tidak ada komentar:
Posting Komentar